|
|
|
Numerische
Methode
Dr.-Ing.
Matthias Klemt |
|
|
Die
exakte Berechung einiger wichtiger Strömungsprobleme im
Schiffbau bereitet noch immer erhebliche
Schwierigkeiten mit den gängigen Methoden basierend auf der
Potentialtheorie. Beispiele sind die Bestimmung großer
Bewegungsamplituden, Stabilitätsprobleme (Kentern) oder auch
Stoßbelastungen durch Fluide (Slamming). Daher entstand die
Idee, diese physikalischen Phänomene mit den wesentlich
aufwendigeren RANSE-Verfahren zu untersuchen.
Für
die Simulation wurde das kommerzielle Programm Comet
verwendet, das auf einer Finiten-Volumen-Methode zur Lösung
der Navier-Stokes-Gleichungen basiert. Die Wechselwirkung der
beiden im Berechnungsgebiet vorhandenen Fluide, Luft und
Wasser, ist durch eine Zweiphasenformulierung (VOF) modelliert.
Die
Körperdynamik wurde über die Benutzerschnittstelle implementiert, wobei beliebige Zwangsbedingungen vorgegeben
werden können. Ein vollimplizites Prediktor-Korrektor-
Verfahren wurde hier verwendet um die Körperbewegungen durch
Integration der Druckund Reibungskräfte auf der Körperoberfläche
zu bestimmen. Nichtlineare Effekte wie Stoßbelastungen,
brechende Wellen, Schiffsantwort in hohen Wellen und viskose Effekte können so
berücksichtigt werden.
Hier
wurde die Methode der überlappenden Gitter
angewendet, um die Änderung der Körperlage und position
in der Diskretisierung zu realisieren. Durch das
Zweigittersystem werden sonst notwendige Gitterverzerrungen
und ein entsprechendes Gittermanagement vermieden. Die Strömungslösung
beider Teilberechnungsgebiete wird an den geschlossenen Rändern
aus dem jeweils anderen Berechnungsgebiet in jeder Iteration
interpoliert zur Sicherstellung einer einheitlichen Strömungslösung
in dem überlappenden Teil des Gitters. Weiterhin wurde eine
Korrektur der mit einem Interpolationsfehler behafteten
Massenflüsse eingeführt, so daß die
Massenerhaltungsgleichung erfüllt wird. |
|
|
Anwendung
und Validierung der numerischen Methode
|
|
Nach
erfolgreichen Versuchen anhand der Berechnung einfacher
geometrischer Körpern und, soweit vorhanden,
der Validierung mit Modellversuchen, wurde das
Verfahren auf praktische Probleme angewendet. Als erster
Anwendungsfall wurden Modellversuche einer schnellen RoRo-Fähre
aus dem europäischen Forschungsprojekt DEXTREMEL
nachgerechnet. Das Hauptaugenmerk lag hier neben der
Ermittlung der Körperbewegung in der genauen Bestimmung der
lokalen Stoßbelastungen auf die Bugklappe. Zu diesem Zweck
wurde zunächst eine Konvergenzuntersuchung mit drei
systematisch verfeinerten Gittern D1, D2 und D3 durchgeführt
zur Feststellung des Diskretisierungsfehlers in den
gekoppelten Berechnungen. Abbildung
1
zeigt die Schiffsposition und die freie Oberfläche für
die grobe (D1) und die feine Diskretisierung (D3) im Zeitpunkt des Eintauchens der Bugsektion.
|
|
|
|

Abbildung
1
Schiffsposition
und freie Oberfläche im Zeitpunkt t=32.1 s für die
Berechnungen mit den Diskretisierungen D1 und D3,
(v=26 kn, Fn=0.324) |
|
|
|
Nach
der Abschätzung des Diskretisierungsfehlers wurde im weiteren
Verlauf eine Reihe von Wellenbedingungen mit der groben
Disktretisierung D1 durchgeführt und mit den Modellversuchen
und weiteren vorhandenen Methoden (GLTiS, Precal)
verglichen, um die Prognose der lokalen Schiffsbelastungen
durch die numerische Methode zu bewerten.
Als weitere Anwendung wurde ein modernes Containerschiff (SALOME
NORASIA) in sehr hohen Wellen (H=21 m) simuliert. Ziel
war es, das Verhalten der Methode daraufhin zu untersuchen,
stark nichtlineare Oberflächeneffekten wie über Deck
kommendes Wasser und deren Einfluß auf die Schiffsbewegung
stabil zu berechnen. Abbildung 2
zeigt das Auftreten dieser Effekte zu zwei
verschiedenen Zeitpunkten.
 
Abbildung
2
Containerschiff in sehr hohen Wellen
In der letzten Anwendung wurde eine Segelrennyacht der Firma
Judel & Vrolijk simuliert. Der Vortrieb der Segelyacht
wurde durch die Segel und das Auftreten einer Luftströmung
(Wind) realisiert, die Schiffsbewegung bestimmt sich dagegen
aus dem Auftreten der Fluidkräfte von Luft- und Wasserströmung.
Ziel war es, die Gleichgewichtslage (Vorwärtsgeschwindigkeit,
Driftwinkel, Roll- und Stampfwinkel sowie Ruderlage) auf einem
vorgegebenen Designkurs zu bestimmen und mit den Abschätzungen
zu vergleichen. Die Diskretisierung wurde so generiert, dass
eine Ruder- und Segelbewegung während der Simulation ermöglicht
wurde. Abbildung 3
zeigt die berechnete Gleichgewichtslage für einen
vorher festgelegten Kurs des Schiffes. |
|
|
|
Abbildung
3 Segelrennyacht in
Luft- und Wasserströmung in der berechneten
Gleichgewichtslage
Nach
systematischen Berechnungen mit 5 Freiheitsgraden (Gierwinkel=const.)
und einem einfachen Regelalgorithmus zur Bestimmung der
Ruderlage wurde auch ein externer Autopilot (realisiert in
Matlab/Simulink) getestet, der die Segelyacht bei Vorgabe
aller 6 Freiheitsgrade erfolgreich auf Kurs hielt.
|
|
|
|
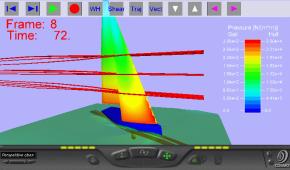
Auswertung
der Simulationsergebnisse
Abschließend wurde für die durchgeführten Berechnungen ein
Postprocessor entwickelt, der es dem externen Betrachter ermöglicht,
die großen Datenmengen aus den aufwendigen CFD-Berechnungen
in einem einzigen 3D-Visualisierungsmodell zu analysieren. Es
wurde der frei verfügbare VRML-Interpreter verwendet, um mit
verschiedenen Techniken die physikalischen Vorgänge in der
Strömung darzustellen. So wurde u. a. die Möglichkeit
vorgesehen, durch Interaktion verschiedene Variablen wie Druck
und Reibungskräfte auf der Schiffsoberfläche, die Wellenhöhe,
Partikelbahnen oder Verwirbelungen allein oder in Kombination
anzuzeigen. Der große Vorteil für den Betrachter besteht in
der freien Orientierung in Raum und Zeit und der Wahl der
anzuzeigenden Variablen, um einen umfassenden Eindruck von den
Vorgängen in der Strömung zu erhalten. Abbildung 4
zeigt zwei Beispiele für die Einstellungen innerhalb
des Postprocessors.
 
|
|
|
|
|
|
Abbildung 4 Beispiele für die
VR-Visualisierung der Berechnung der RoRo-Fähre und der
Segelrennyacht; links Druck auf der Oberfläche,
rechts Schubspannungen
|
|
|
|
|